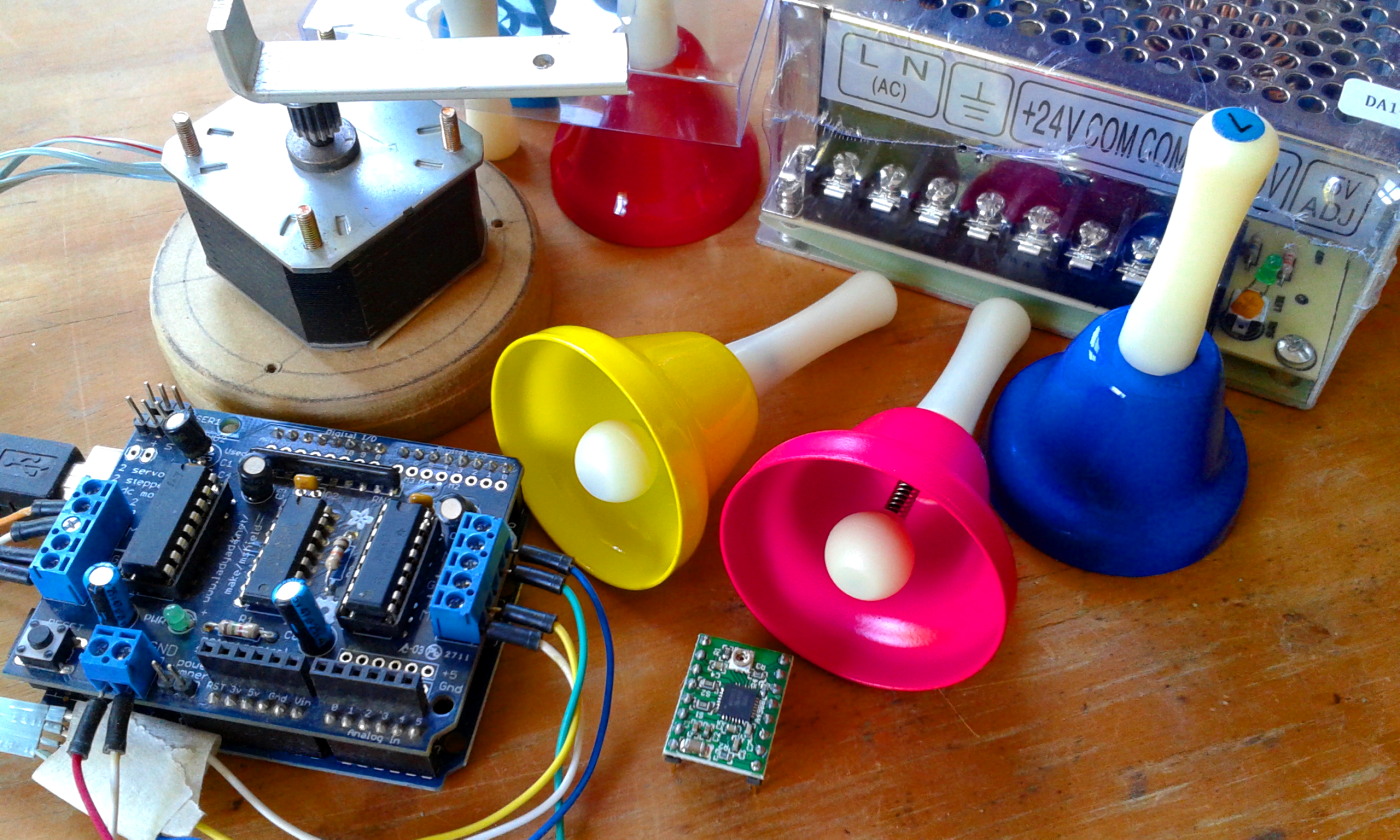
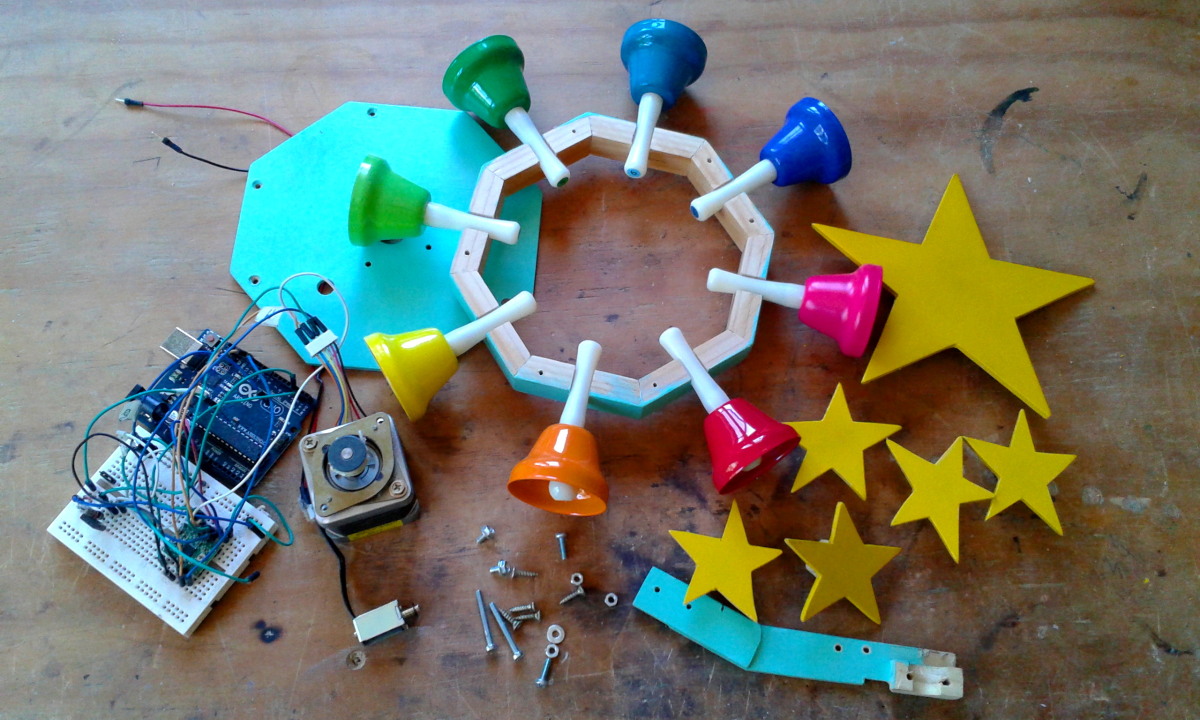
These are some of the components at the beginning of the project, some are going to be used some not.
This is my last project, a musical Christmas wreath controlled by a Arduino microprocessor . I was looking for a Christmas project where I can use a recycled stepper motor. The idea came when I found a set of tuned bells in individual notes so I have this idea to use them as a Christmas wreath.

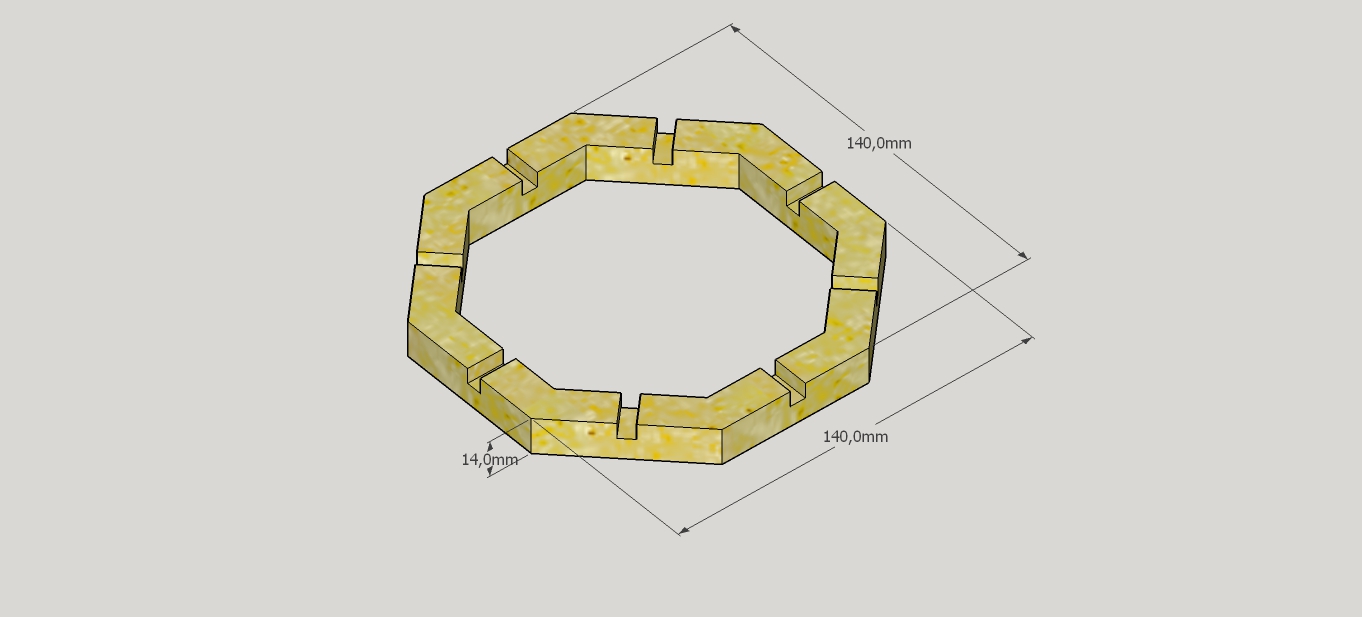
Wood Octagon 140 x 140 mm.

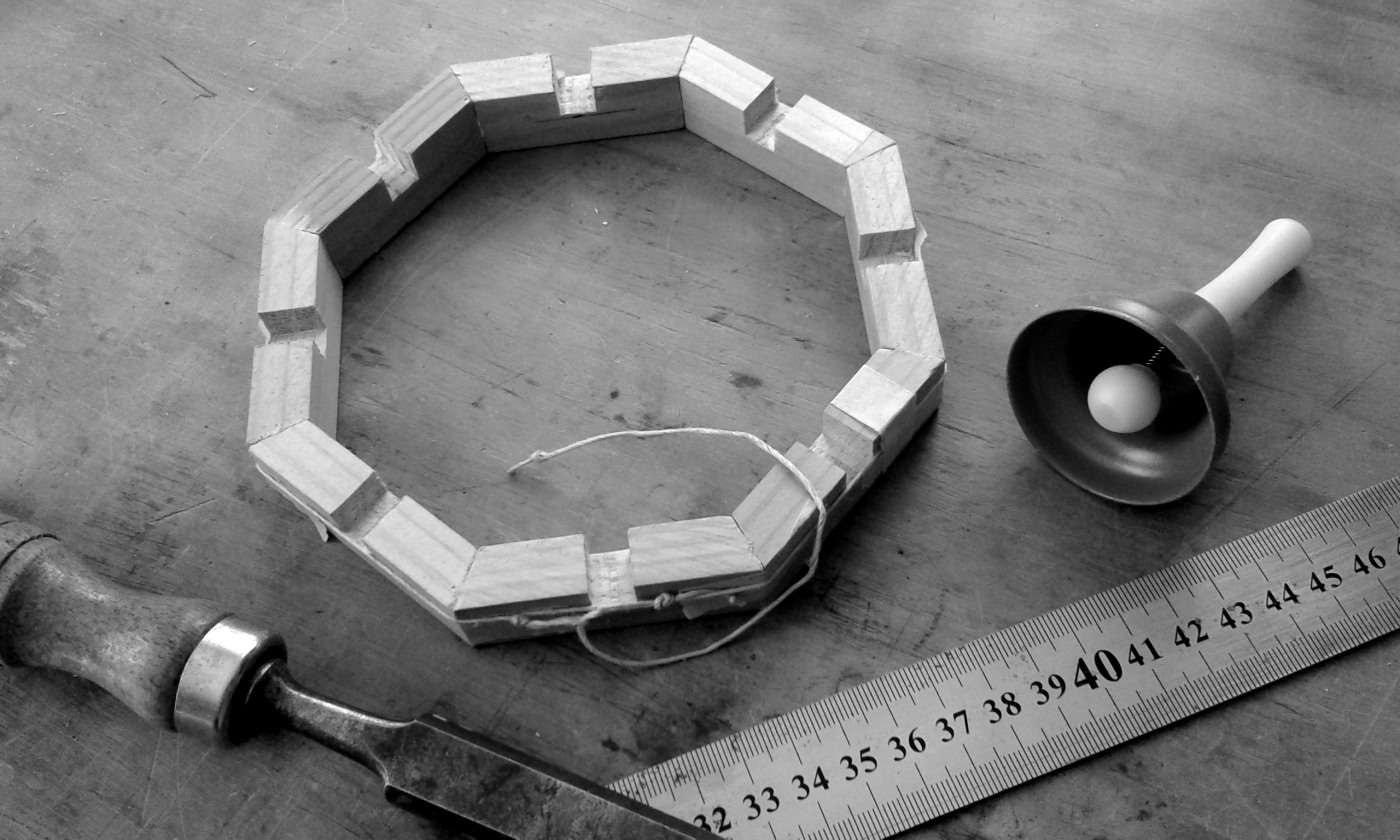
The eight segments cut and with a recess to hold the bells.

The pieces are glued and a piece of string keeps all together while it dries

On the wooden structure goes a piece of 3mm MDF and in the middle a Nema 17 stepper motor is fixed.
As the idea was to make a Christmas wreath the 8 bells are distributed in a circle on an octagonal base of 14 cm. wide, at each vertex of the octagon slot supports the bells. In the center of the octagon a stepper Motor Nema 17, recycled from a printer, is installed.

On the motor pulley a wooden support is made on which the arm is going to be fixed.

The components of the arm: A 8 gr microservo, the wooden support, 3 mm MDF arm, 3mm nuts and bolts.

The servo mounted ready for the first test.
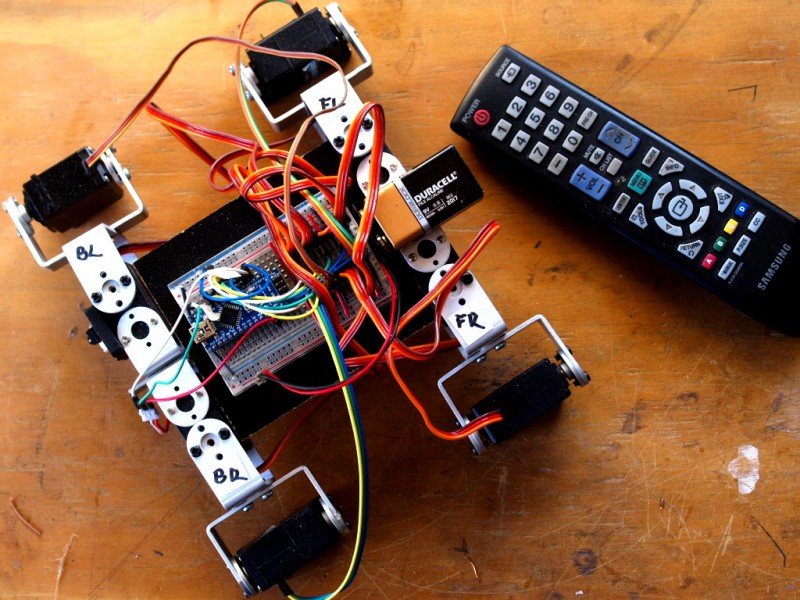
To adapt the engine I made a wooden support where goes an arm where an 8 gr microservo is attached. In the first version I used an Arduino UNO and an Adafruit motor shield.
In this video we see that the system works but the servo is too slow to hit the bell and the stepper motor is not strong enough and steps are skipped.

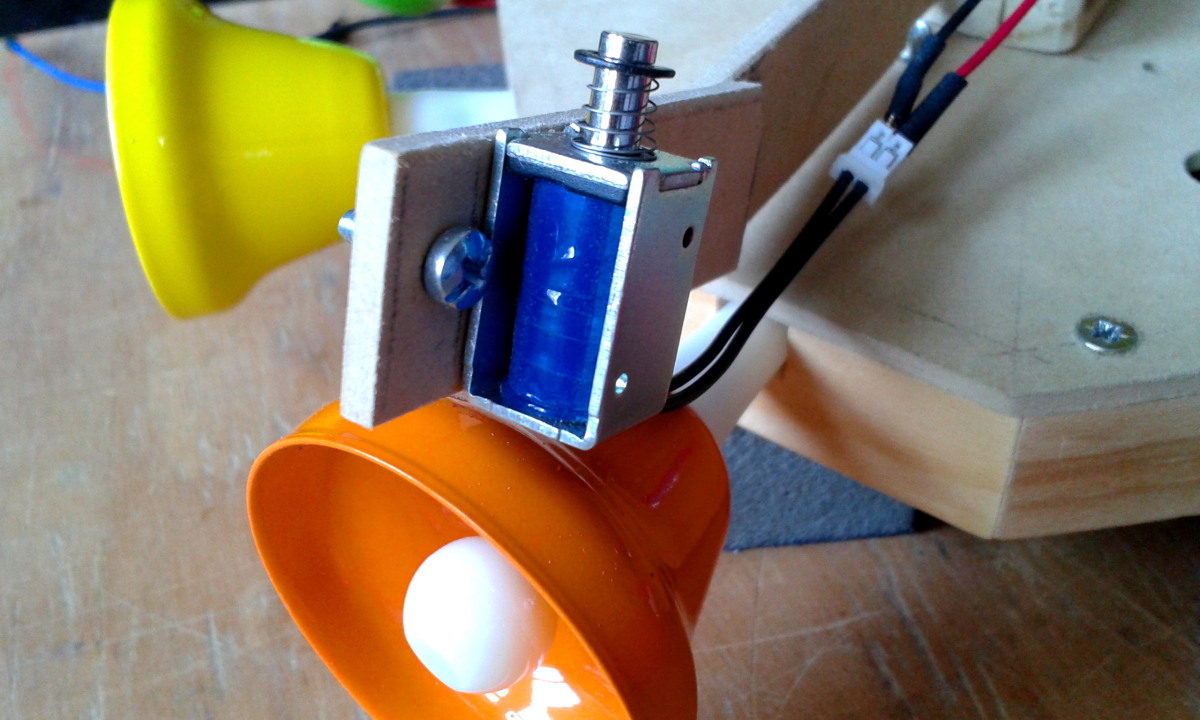
In the secónd test the servo is replaced by a 5 volt solenoid

The controller is now a A4988 stepper driver and BD677 transistor to control the solenoid.
In the second version I use a recycled Nema 17 from a Xerox copier and A4988 stepper driver to control the motor via the amperage and thus use a higher voltage. To hit the bells I use now a small 5 volt solenoid controlled by a digital signal through a BD677 transistor..
Now the engine has enough torque and no steps are skipped, the solenoid hits the bells properly. The problem that arises now is that the arm acts as a sounding board and amplifies the sound of the motor.

A little paint and some stars made of 3 mm MDF and everything is ready to be mounted.

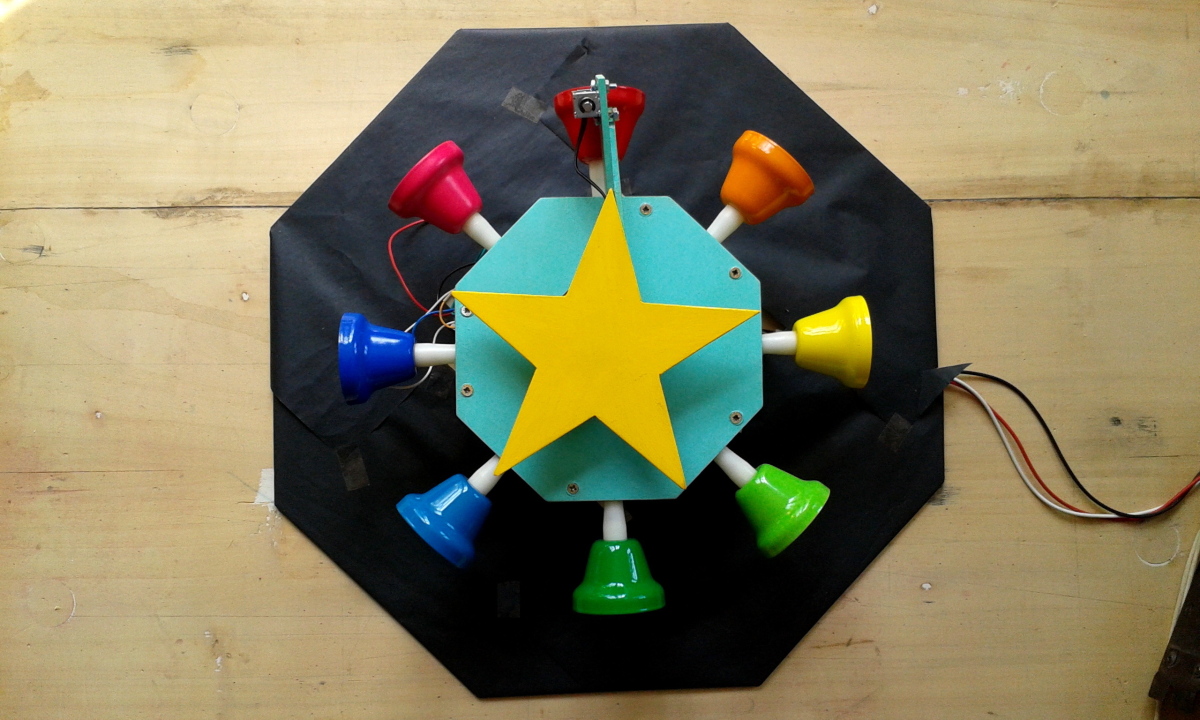
The system is ready, mounted on a 3mm MDF base and the electronic components are under the structure.

The wreath is made with brown paper, the stars are installed and all is ready to run.
I made a new arm support polyethylene and the noise decreases slightly. Structure is now on wooden posts and is mounted on an octagonal 3 mm MDF base. From scrap wood I cut some stars, all items are painted. With brown paper I make a braid and with it the wreath where the stars are installed and now all is ready to run.
I will leave it as it is because this project is very simple and only intended as an experiment to learn to use the stepper driver. If someone needs the code and the electronic scheme just ask.





 Las piezas de terciado listas para ser pegadas.
Las piezas de terciado listas para ser pegadas.